Vídeo demo
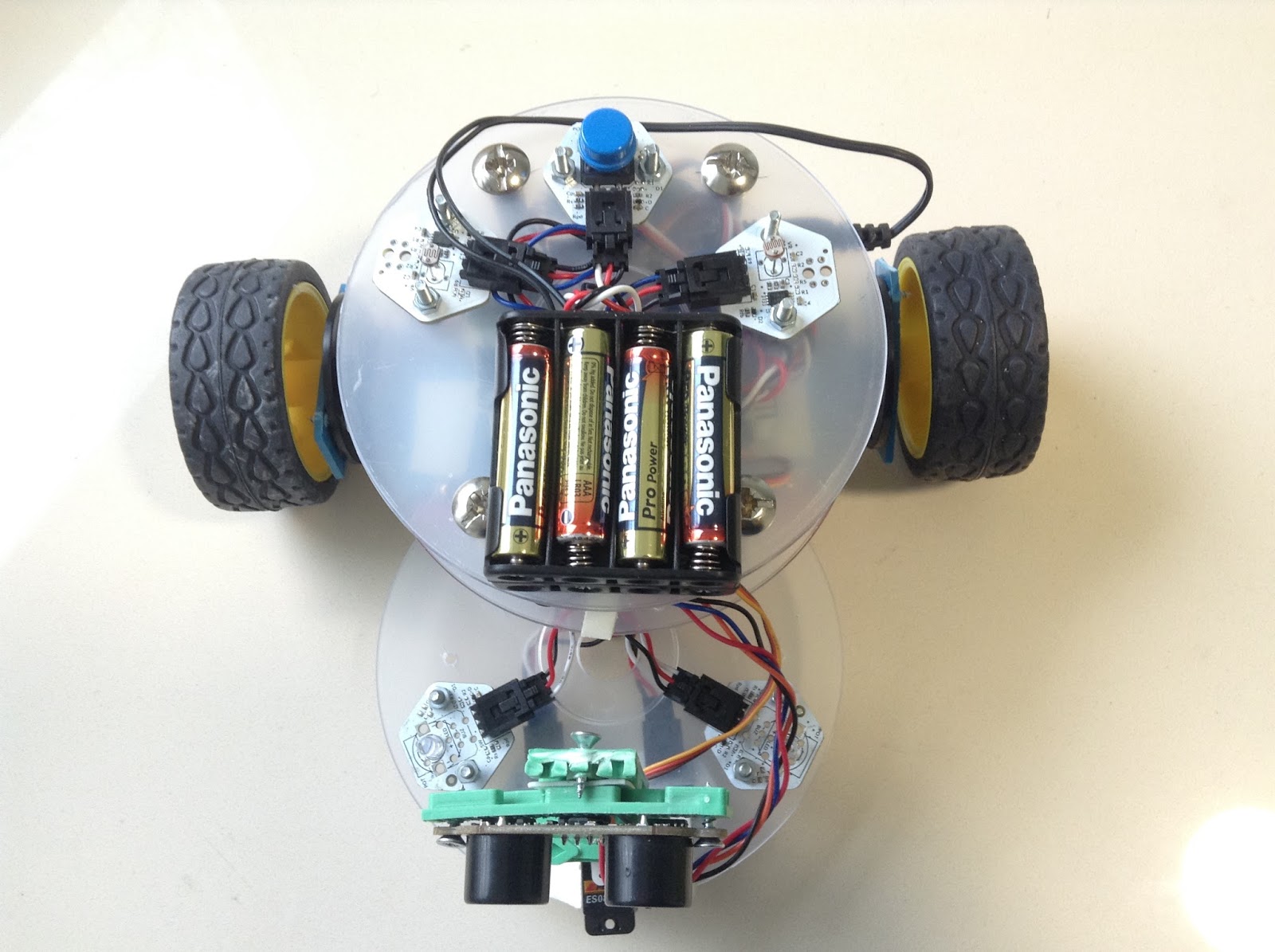
Además, contamos con dos servos de rotación continua como actuadores, conectados a la rueda izquierda y a la rueda derecha, que nos permiten guiar el robot según la información recibida por los sensores de luz.
Si analizamos la situación, vemos que según la intensidad de la luz recibida por los dos sensores LDR nos encontraremos con cuatro estados diferentes:
•Los dos sensores no reciben una intensidad superior al mínimo establecido ⟹ Los dos servos se paran.
•El sensor derecho recibe luz suficiente, pero el izquierdo no ⟹ Se para el servo derecho y gira el izquierdo para poder girar a la derecha.
•El sensor derecho no recibe luz suficiente, pero el izquierdo sí ⟹ Gira el servo derecho y se detiene el izquierdo para poder girar a la izquierda.
•Los dos sensores reciben una intensidad superior al mínimo establecido ⟹ Los dos servos giran avanzando.

• Colocación de dos leds, uno en la izquierda y otro en la derecha. Estos leds se iluminarán siempre que se gire para el lado correspondiente, y en el caso de que el robot avance recto permanecerán iluminados los dos.
• Cuando el robot se detenga los dos leds parpadearán, como sistema de señalización.
https://drive.google.com/file/d/0BwZcNQ8N6TusdVFEUlhVWFpZREE/view?usp=sharing
Todo el proceso de construcción y programación en arduino del robot sigueluz se puede ver en el siguiente VÍDEO TUTORIAL.



